手機(jī)百家家樂app下載 11個數(shù)據(jù)集全拿SOTA!機(jī)器東說念主終于既會“看”又會“動”了
遐想一下,你給機(jī)器東說念主看了一張相片,然后說了一句"把微波爐掀開"。
終局它不僅認(rèn)出了該摸的位置,還狡計了出圓善的三維領(lǐng)路軌跡,要津是的確把門拉開了,況兼得手率高達(dá) 90%。
這件事,一個叫 AFUN 的新模子作念到了,同期還在 11 個數(shù)據(jù)集上拿到了 SOTA。

這種看出東西穎異什么、該何如動的智商,學(xué)術(shù)上叫可供性感知。
這個智商,機(jī)器東說念主學(xué)了好多年,遙遠(yuǎn)差著連氣兒,不是不會看,即是不會動。
總之,這兩件事險些沒被歸并個模子同期貶責(zé)過,直到這篇 AFUN,補(bǔ)上了這個缺口。
機(jī)器東說念主為什么能"看"不可"動"
以前作念可供性的東說念主,基本都在貶責(zé)歸并個問題,那即是機(jī)器東說念主"該摸何處"。
這種格式下,唯有輸出一個分割掩碼,梗概標(biāo)幾個要津點,繼續(xù)就算收場。
至于機(jī)器東說念主戰(zhàn)斗之后物體該往哪走、用多放蕩、沿什么標(biāo)的領(lǐng)路,險些莫得步調(diào)去回復(fù)。
但在實質(zhì)任務(wù)中,機(jī)器東說念主要完成一個操作任務(wù),光知說念"持把手"是不夠的,它還需要知說念收攏之后該往哪個標(biāo)的拉、轉(zhuǎn)若干角度、走多長距離。
莫得這些信息,機(jī)械臂只可停在那里。
于是另一批東說念主轉(zhuǎn)去繼續(xù)領(lǐng)路瞻望,但很快際遇新的墻。
大多數(shù)步調(diào)只可在 2D 圖像平面上給出軌跡,機(jī)器東說念主信得過實驗的工夫需要三維信息,平面上的箭頭沒法告訴它該往前推如故往上抬。
還有一些步調(diào)干脆要求東說念主先指出遐想在哪再瞻望何如動,繞開了定位問題,導(dǎo)致機(jī)器東說念主沒法信得過自主部署。
兩條路都受限于數(shù)據(jù)。
現(xiàn)存的可供性數(shù)據(jù)集廣博限制偏小、隱敝場景有限,模子能見到的物體種類和交互類型都很窄。
終局即是,在實驗室里調(diào)出來的模子遵守還算可以,但換一個沒見過的物體、換一個新場景,其性能就會大幅下滑。
這亦然為什么現(xiàn)存步調(diào)很難走出實驗室完結(jié)信得過落地的一個原因。
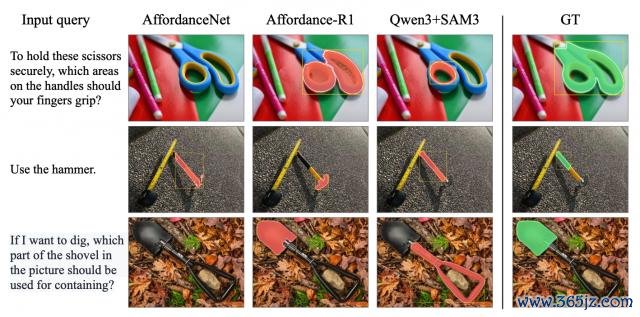
還有一個更壓根的問題,一直莫得被正面貶責(zé)——歸并個物體在不同任務(wù)下需要交互的區(qū)域竣工不同。
讓機(jī)器東說念主使用錘子,它該持柄;讓它用錘子壓住紙,它該持頭。
這個問題照舊稀零了識別,需要模子去理銜命務(wù)意圖,但靜態(tài)的分割模子,從遐想上就莫得智商作念這種別離。
AFUN 何如作念到的
AFUN 的中樞念念路是把三個照舊老師好的大模子拼在一齊,百家樂IOS/安卓通用版/手機(jī)APP下載各司其職。
Qwen3-VL 精采貫通言語教唆,SAM3 精采圖像分割,Sonata 精采處理深度圖轉(zhuǎn)成的三維點云。
三個模子在老師經(jīng)過中全程凍結(jié),AFUN 只在它們之間新加了 3200 萬個參數(shù),并把它們串聯(lián)起來。
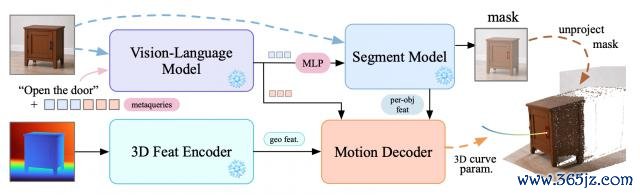
串聯(lián)的樣貌叫 MetaQuery。
膚淺說,即是在輸入的翰墨教唆里插入一組可學(xué)習(xí)的很是 token,讓它們隨著教唆一齊過 Qwen3-VL 的 transformer,索要出來的隱層現(xiàn)象,再分別送給分割模子和領(lǐng)路瞻望模塊。
分割和領(lǐng)路兩個任務(wù)則分享歸并次 VLM 的推理,一次前向傳播同期出兩個終局。
領(lǐng)路的暗示樣貌亦然 AFUN 的一個遐想遴薦。
它用貝塞爾樣條弧線來形貌物體戰(zhàn)斗后的領(lǐng)路軌跡,來源固定在分割掩碼的深度質(zhì)心上,模子只需要瞻望后續(xù)的甘休點。
弧線上均勻采樣之后,就得到了機(jī)器東說念主可以平直實驗的一串三維旅途點。
老師分三個階段進(jìn)行。
第一階段先在 Visual Genome 數(shù)據(jù)集上對王人 MetaQuery 與 SAM3 的特征空間,給后續(xù)老師一個自在的運(yùn)行化;
第二階段在四個可供性數(shù)據(jù)集上專門老師分割;
第三階段把領(lǐng)路瞻望加進(jìn)來聚合老師。
這么的安排是為了審視當(dāng)場運(yùn)行化的 token 在早期侵犯分割質(zhì)地,讓兩個任務(wù)的學(xué)習(xí)都能自在進(jìn)行。
數(shù)據(jù)方面,AFUN 從 10 個公開數(shù)據(jù)源里團(tuán)聚了 32 萬條原始視頻,跳躍機(jī)器東說念主遙操作、東說念主類第一視角、仿真環(huán)境和簡直場景掃描四類來源。
原始片斷經(jīng)過切分之后有 124 萬個動作區(qū)間,再經(jīng)過自動化活水線標(biāo)注和東說念主工質(zhì)檢,最終留住約 6 萬條老師樣本。
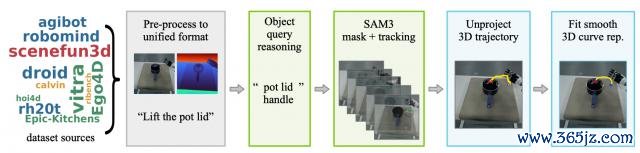
這套活水線里還有一個容易被疏遠(yuǎn)的遐想調(diào)動。
以前好多數(shù)據(jù)集用機(jī)械臂或手部的領(lǐng)路軌跡行為監(jiān)督信號,但這段軌跡里混入了廣博戰(zhàn)斗之前的無關(guān)領(lǐng)路。
AFUN 將其改為平直跟蹤物體自己,因為戰(zhàn)斗發(fā)生之后物體往哪走,才是信得過專誠念念興致的操作信息。

11 個測試集 SOTA
AFUN 在 11 個測試集上拿到了 SOTA,隱敝分割、戰(zhàn)斗點瞻望、3D 領(lǐng)路瞻望三個標(biāo)的。
在分割任務(wù)上,繼續(xù)團(tuán)隊用 8 個測試集作念了考據(jù),隱敝 4 個不同的基準(zhǔn)。AFUN 在每個測試集上都拿到了 SOTA,平均 gIoU 和 cIoU 比最強(qiáng)基線分別高出 23.9 和 26.3 個點。
戰(zhàn)斗點任務(wù)重,AFUN 取瞻望掩碼的最遠(yuǎn)內(nèi)點行為戰(zhàn)斗點,在不同測試集上射中率比最好基線高出 12.7% 到 61.3% 不等。
3D 領(lǐng)路瞻望方面,在對比條目對 AFUN 并不算故意的條目下,對比模子 General Flow 的 ADE 和 FDE 在全部三個測試集上依然不足 AFUN。
臨了是簡直機(jī)器東說念主部署。
AFUN 在 Franka 機(jī)械臂上測了四項任務(wù),提起螺絲刀、取下鍋蓋、拉開抽屜、掀開微波爐,莫得針對這臺機(jī)械臂作念任何微調(diào),平均得手率 90%。
作家簡介
本文的兩位共歸并作分別是 Zhaoning Wang 和 Yi Zhong。
Zhaoning Wang 是密歇根大學(xué)博士生,師從 Jun Gao,繼續(xù)標(biāo)的涵蓋 3D 神經(jīng)暗示、生成模子與具身 AI。
此前他在 Hillbot 和 UC 圣地亞哥蘇昊實驗室有過繼續(xù)閱歷,曾以一作或共歸并作身份在 CVPR、ECCV、NeurIPS 等頂會發(fā)表論文。
Yi Zhong 相通就讀于密歇根大學(xué)。
其余作家包括 Jiawei Fu、UC 圣地亞哥機(jī)器東說念主繼續(xù)所長處 Henrik I. Christensen,以及密歇根大學(xué)助理培育、NVIDIA 繼續(xù)科學(xué)家 Jun Gao。
論文地址:
https://arxiv.org/abs/2606.02551
一鍵三連「點贊」「轉(zhuǎn)發(fā)」「堤防心」
原諒在批駁區(qū)留住你的主張!
— ?完? —
專屬 AI 家具從業(yè)者的實名社群,只聊 AI 家具最落地的真問題?? 掃碼添加小助手,發(fā)送「姓名 + 公司 + 職位」央求入群~

進(jìn)群后,你將平直獲取:
? ? ? 最新最專科的 AI 家具信息及分析 ? ? ?
? ? ? ? 不按期披發(fā)的熱點家具內(nèi)測碼 ? ?
? ? ? ? 里面專屬內(nèi)容與專科商量 ? ?
? ? 點亮星標(biāo) ? ?
亞搏體育中國一站式服務(wù)官網(wǎng)科技前沿說明逐日見手機(jī)百家家樂app下載